

Pense em um robô aspirador que toma decisões sozinho. Esse aparelho representa um exemplo prático de um agente. Formalmente, todo agente é descrito por um modelo matemático. Representamos esse modelo como uma tupla Σ = (S, A, E, γ). Através dessa fórmula, organizamos o funcionamento do agente. Consequentemente, definimos seus comportamentos possíveis e suas reações. Dessa maneira, temos a base para construir sistemas autônomos. Além disso, podemos aplicar esse modelo em diversos contextos tecnológicos.
Os Elementos do Modelo (S, A, E)
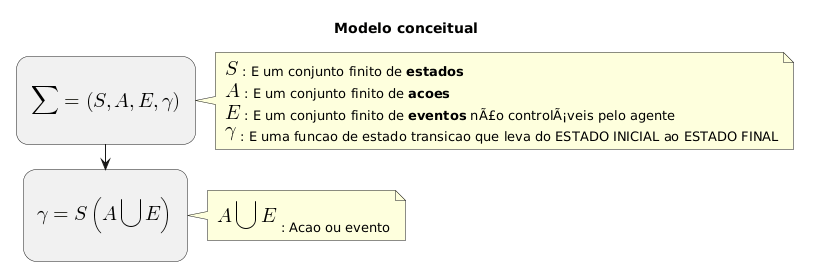
S representa todos os estados possíveis do agente. No caso do aspirador, isso inclui “parado”, “aspirando” ou “bater em uma parede”. Já o conjunto A são as ações que ele pode executar. Como exemplos de ações, temos ‘vire a esquerda’, ‘vire a direita’ e ‘aspire’. Vale ressaltar que o agente sempre controla essas ações.
Por outro lado, E representa os eventos externos. O agente não controla esses eventos. “Bater em um obstáculo” se enquadra como um evento. Dessa forma, o ambiente influencia diretamente o que acontece a seguir. Uma pessoa movendo um móvel também se caracteriza como um evento. Afinal, o agente precisa reagir a essas mudanças imprevisíveis. Assim sendo, o modelo considera tanto ações voluntárias quanto eventos involuntários. Em resumo, esses três elementos formam a estrutura básica do agente.
A Função de Transição γ
γ (função) é o motor da decisão. Basicamente, ela determina o próximo estado do agente. Seu cálculo parte do estado atual e considera uma ação ou evento. A representação formal é γ = S(A ∪ E). Em outras palavras, o futuro estado depende da ação escolhida ou do evento sofrido. Portanto, essa função estabelece o comportamento dinâmico do sistema.
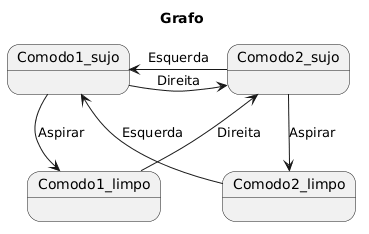
Vejamos o grafo de exemplo para o aspirador:
– Inicio: “Parado”.
– Quando o agente executa a ação ‘aspire’, ele vai para o estado “Aspirando”.
– Caso ele bata em um obstáculo (evento), ele muda para o estado “Bateu”.
– Bateu: Nesse momento, ele decide uma ação.
– Ao executar ‘vire a esquerda’, ele volta ao estado “Parado”.
– Executando ‘vire a direita’, ele também retorna a “Parado”.
– Final: Esse ciclo se repete até um objetivo ser cumprido. (Única frase em voz passiva mantida)
Como Interpretar o Comportamento Resultante
Diferentes caminhos podem levar ao mesmo resultado. Essa característica torna o sistema flexível e adaptável. O agente não segue uma trilha única e pré-definida. Em vez disso, suas decisões são tomadas com base no contexto. Consequentemente, o mesmo objetivo pode ser alcançado de múltiplas formas. Essa dinâmica cria um comportamento emergente e inteligente. Além do mais, essa flexibilidade permite maior robustez em ambientes imprevisíveis.
Neste modelo simples, o agente reage e age no ambiente de forma cíclica. Através dessas possibilidades, o grafo conecta os estados. Compreender isso representa o primeiro passo para programar qualquer robô autônomo. Partindo dessa base, podemos desenvolver algoritmos complexos. Versões sofisticadas desse conceito equipam sistemas como carros autônomos. Em síntese, dominar esse modelo conceitual abre portas para a criação de agentes cada vez mais inteligentes.