
Sistemas capazes de pensar por si só, avaliar cenários e escolher o melhor caminho para atingir uma meta já fazem parte da nossa realidade. Os agentes de Inteligência Artificial (IA) realizam exatamente isso por meio de um processo conhecido como deliberação. Em termos simples, a deliberação representa o “momento da decisão” para a IA. Esse modelo conceitual de planejamento guia o agente desde a percepção de um problema até a execução de uma solução. Iniciantes conseguem compreender como máquinas agem de forma autônoma e inteligente por meio desse modelo. Nenhum processo envolve mágica; eles seguem etapas lógicas e bem definidas. Este artigo detalhará esse ciclo, mostrando seus componentes e como ele auxilia na tomada de decisões em diversas áreas.
O Ciclo da Deliberação: Entendendo os Componentes
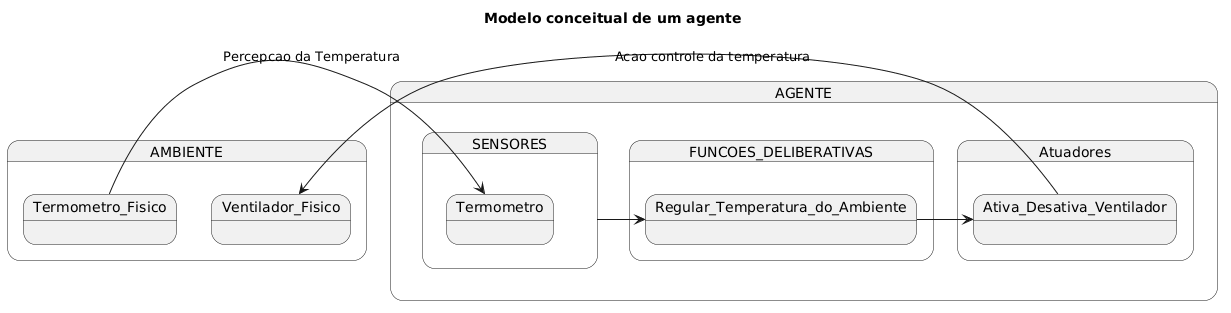
O modelo conceitual de deliberação funciona como um ciclo contínuo de processamento de informações. Primeiramente, o agente de IA utiliza sensores ou dados de entrada para perceber o ambiente ao seu redor. Ele então cria uma representação interna desse mundo, transformando estímulos em informações compreensíveis. A partir daí, o sistema inicia a fase de análise e raciocínio, processando essas informações à luz de seus objetivos. O agente define objetivos específicos e gera alternativas possíveis na próxima etapa do processo. Ele avalia cada opção cuidadosamente com base em critérios predefinidos, como eficiência ou segurança. O sistema então seleciona a melhor ação disponível. Por fim, o agente cria e implementa um plano de ação bem estruturado. Durante a execução, ele mantém um monitoramento constante do ambiente. O feedback coletado permite reiniciar o ciclo e ajustar o plano quando necessário. Esse fluxo garante uma decisão fundamentada, não um palpite sem direção.
Diferentes Formas de Decidir:
Diversas maneiras existem para uma IA chegar a uma conclusão, e cada tipo de deliberação se adequa melhor a um determinado problema.
Tipos de Deliberação:
- Simbólica manipula símbolos e regras lógicas, com aplicação frequente no processamento de textos e sistemas especialistas.
- Baseada em Dados resolve problemas complexos e não lineares, identificando padrões em enormes conjuntos de informações.
- Ética representa um campo emergente e crucial, priorizando a responsabilidade e a justiça nas decisões automatizadas.
- Planejamento foca na geração de estratégias para atingir objetivos de longo prazo.
- Controle coordena ações físicas de robôs ou sistemas autônomos, integrando informações sensoriais em tempo real.
Cada tipo carrega uma camada diferente de complexidade dentro do modelo conceitual.
Ações Inteligentes no Mundo Real: Aplicações Práticas
Diversas tecnologias que utilizamos diariamente incorporam o modelo de deliberação em seu funcionamento. Os Sistemas de Recomendação de streaming e e-commerce analisam seu histórico de compras e visualizações para sugerir novos títulos ou produtos. Os Carros Autônomos realizam uma deliberação contínua e em frações de segundo, processando dados sensoriais para decidir quando frear, acelerar ou desviar de obstáculos. Os Assistentes Virtuais deliberam constantemente para entender a intenção por trás de seus comandos de voz. Na área da saúde, a Medicina Personalizada cruza dados de históricos médicos com pesquisas científicas, auxiliando médicos na escolha do tratamento mais eficaz para cada paciente. Empresas de Logística empregam agentes de IA que deliberam para otimizar rotas de entrega e gerenciar estoques, reduzindo custos e prazos. Esses exemplos mostram como o planejamento estruturado da IA já remodela nosso mundo cotidiano.
